What?
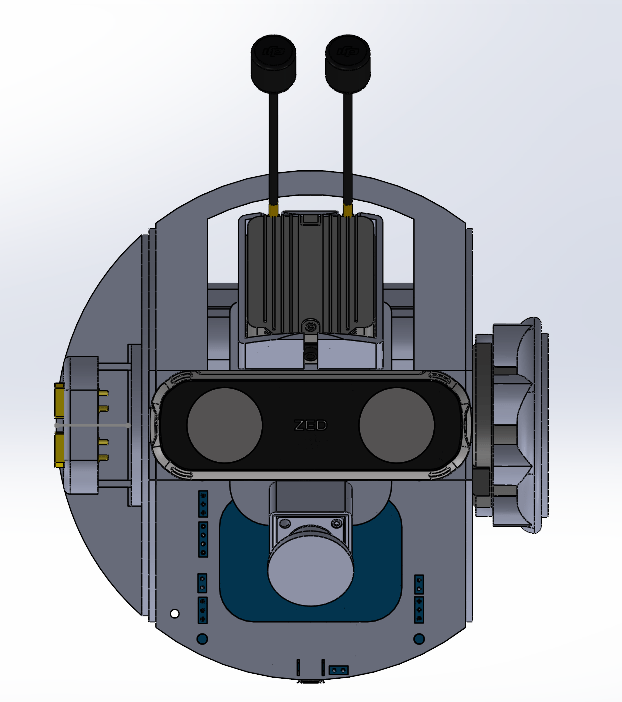
The primary functional requirement was to house a large sensor payload, specifically a Zedx Mini Depth Camera and DJI FPV unit, within an aerodynamic and stabilized package. The design intentionally neglected yaw stabilization to avoid increasing the UAV’s cross-sectional area, which is a consequence of a bottom-mounted gimbal approach. This decision, along with the unique payload weight, limited the availability of commercial “plug-and-play” control boards.
A notable feature of this design is its four-hour battery life, achieved through a custom lithium-ion battery pack that also serves as a counterweight to the off-axis sensor mounting. The final product was realized through multiple design iterations, transitioning from a 3D-printed approach to water-jet-cut carbon sheets, resulting in a highly successful outcome.
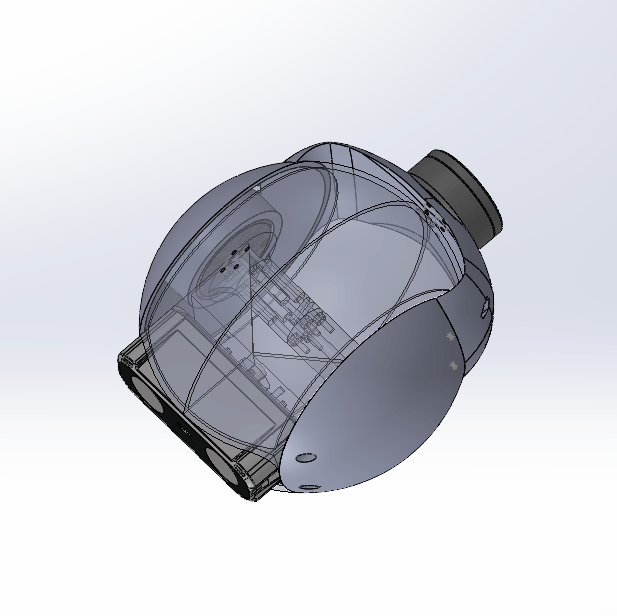

V1.0 CAD – 3D printed Assembly
V2.0 CAD – Carbon Fiber Assembly
Final Implementation
How?
The gimbal utilizes two brushless DC (BLDC) motors mounted on both the pitch and roll axes to stabilize an inertial measurement unit (IMU) in the desired orientation. Details about motor control are provided in the following section. The entire design was created in SolidWorks with tolerances as low as 0.05mm. Communication, encoder, and PWM lines were routed through two slip ring passes located on both axes.
The gimbal can be charged, powered on, and programmed externally, without needing to remove the carbon fiber skin. The video demonstrates the minimal resistance between moving surfaces and highlights the critical role of the battery pack counterweight. This counterweight is essential for mitigating large applied torques on the BLDC motors, which would otherwise cause discrepancies between the mechanical and electrical angles when braked.
Why?
A stabilized camera feed is extremely important, even though it may seem redundant given that localization and mapping algorithms create and update a local map and the drone’s position in that map. However, it is essential for the pilot to be able to take control of the aircraft at any time. In complex environments, a stable and maneuverable camera angle is not just a luxury but a necessity for ensuring the safety of both the drone and bystanders. The video demonstrates the gimbal’s capability to maintain a desired angle in both the pitch and roll axes, as determined by user PWM input.
