What?
Field Oriented Control (FOC), also known as Vector Drive, is a sophisticated technique used in modern controllers for Brushless DC (BLDC) motors. This method enables precise control of velocity and position, making it ideal for robotics applications. It is specifically designed for three-phase motors operating in sinusoidal mode, where each of the three wires is energized with sinusoidal current. This setup allows for effective motor control, optimizing performance in various applications.


Prototype of Gimbal Control Board (Arduino Nano)
V1.0 of Gimbal Control Board (atmega328)
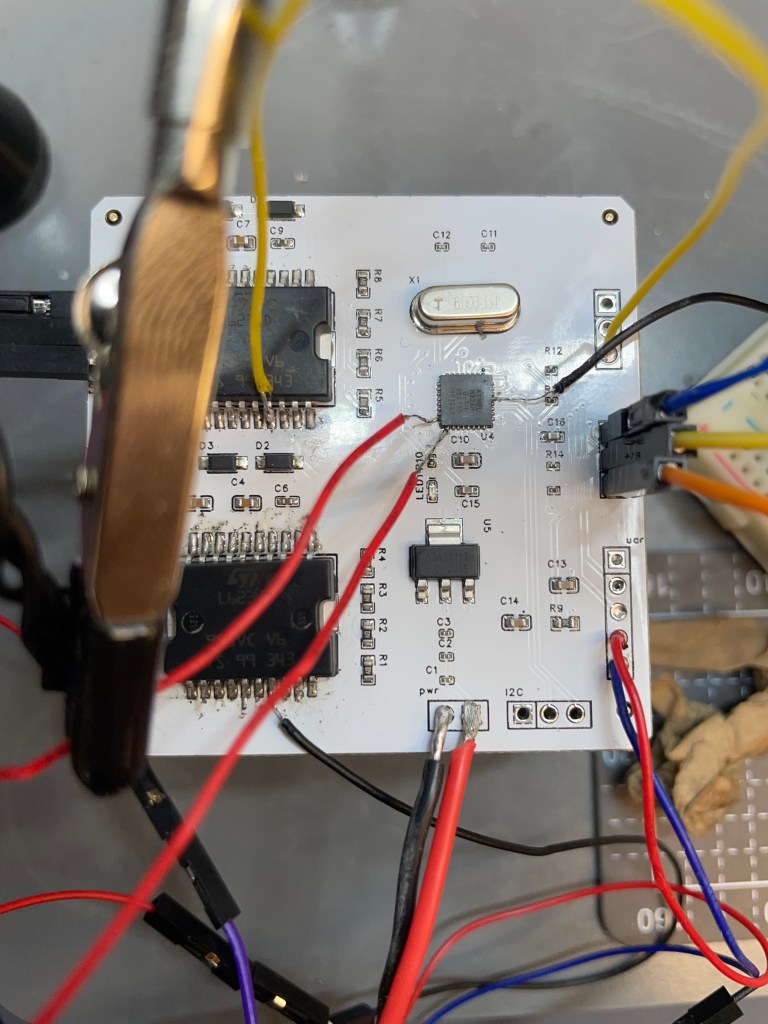
V2.0 of Gimbal Control Board (rp2040)

How?
Utilizing two L6234 brushless motor drivers and an embedded RP-2040, the board is capable of receiving an analog or serial velocity command and converting that command into a three phase output. By controlling the phase of this output the driver controls the rotation speed of the magnetic field. Because the rotor will rotate at roughly the same speed as the magnetic field, this method gives accurate velocity control. Commonly these drivers rely on encoders to provide accurate position/velocity feedback to the controller, for simplicity the driver I have designed only utilizes phase current feedback. This comes with the risk of there being an external torque that overcomes the torque generated be the magnetic field resulting in skipping.
Why?
Accurate velocity control is essential for precise position control, particularly in applications involving dead reckoning positioning. This technique, while straightforward with the addition of an integral term, can lead to drift accumulation if velocity control lacks precision. A practical example of this principle is in the design of a 2-axis gimbal, intended to stabilize the roll and pitch of a ZED-X mini depth camera. By developing the gimbal within the Simulink environment, it becomes feasible to integrate a microcontroller that utilizes feedback from an IMU sensor to achieve two-axis stabilization. In this setup, the position/velocity control system forms a critical component of the overall block diagram, underlining its significance in ensuring the gimbal’s effective operation.
