What?
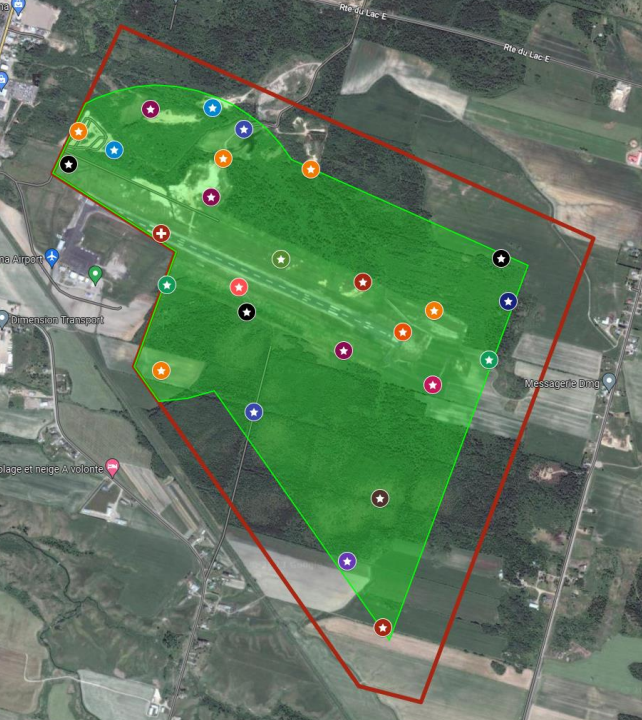
Route Optimization was my main role in this project, while assisting with the route following and simulation. The goal was to simulate a passenger transport UAV, with a random set of flight paths and flight information(weight, number of people, obstacles).
How?
Route Optimization: Used an adjacency matrix to store and represent route information, with each edge containing route information. Then implemented a breadth first traversal of the graph with a best option heuristic limiting time complexity. All of the data structures were written in C.
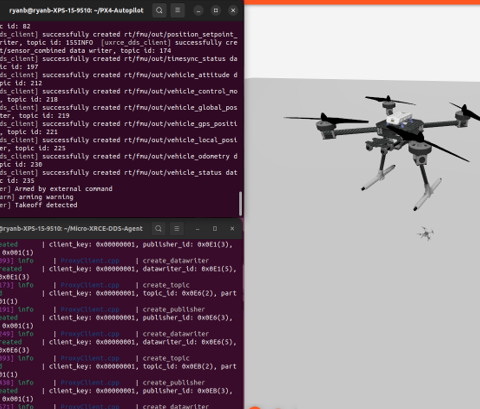
Route Following: PX4/GAZEBOO with ROS2, utilizes a micro XRCE-DDS client to bridge the ROS2 to px4 bridge. This was the system chosen for route following. Although this was not my main area of work I became familiar with the software and assisted where possible.
Why?
Obviously the flight platform is no capable of passenger transport. The purpose of this project was to experiment with drone autonomy and provide a POC for urban transport and efficient route management.

